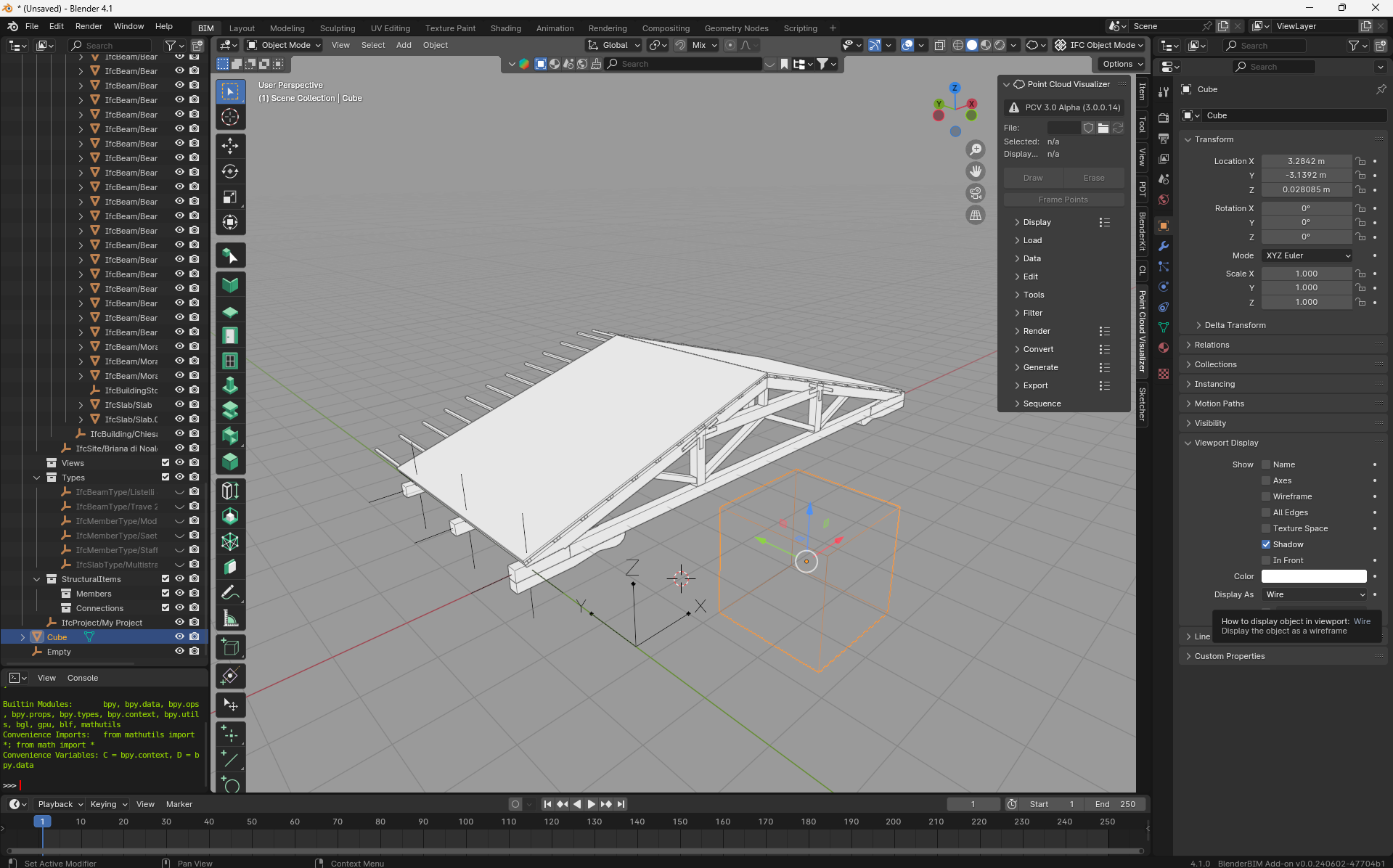
I can share a script I've used in the past when I had the same problem. Nowadays I elect on using the same Blend file all along the life of my project (which has its own quirks when things get corrupted but this happens WAYYY less than a few versions ago) so I don't need to reload PCV settings.
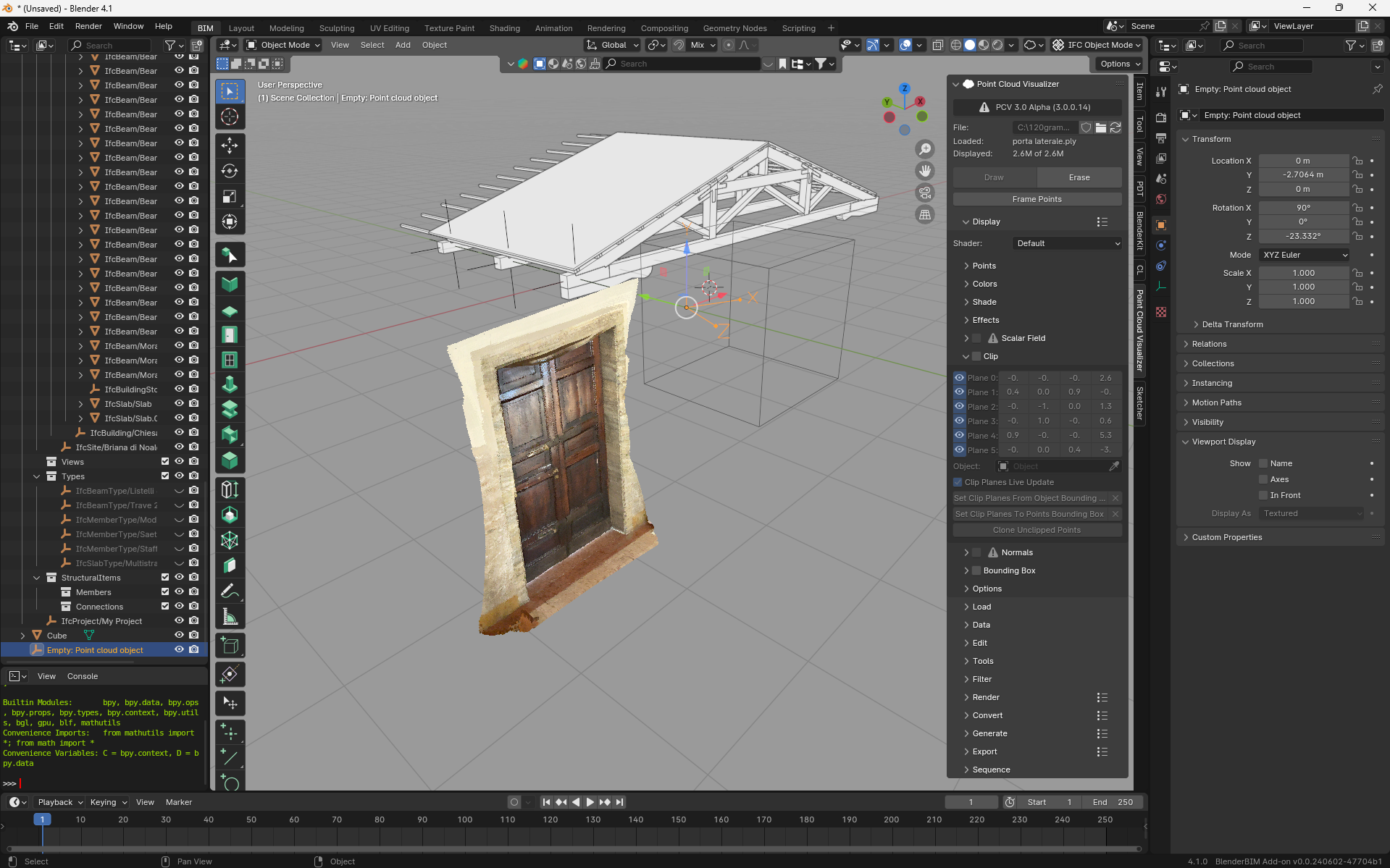
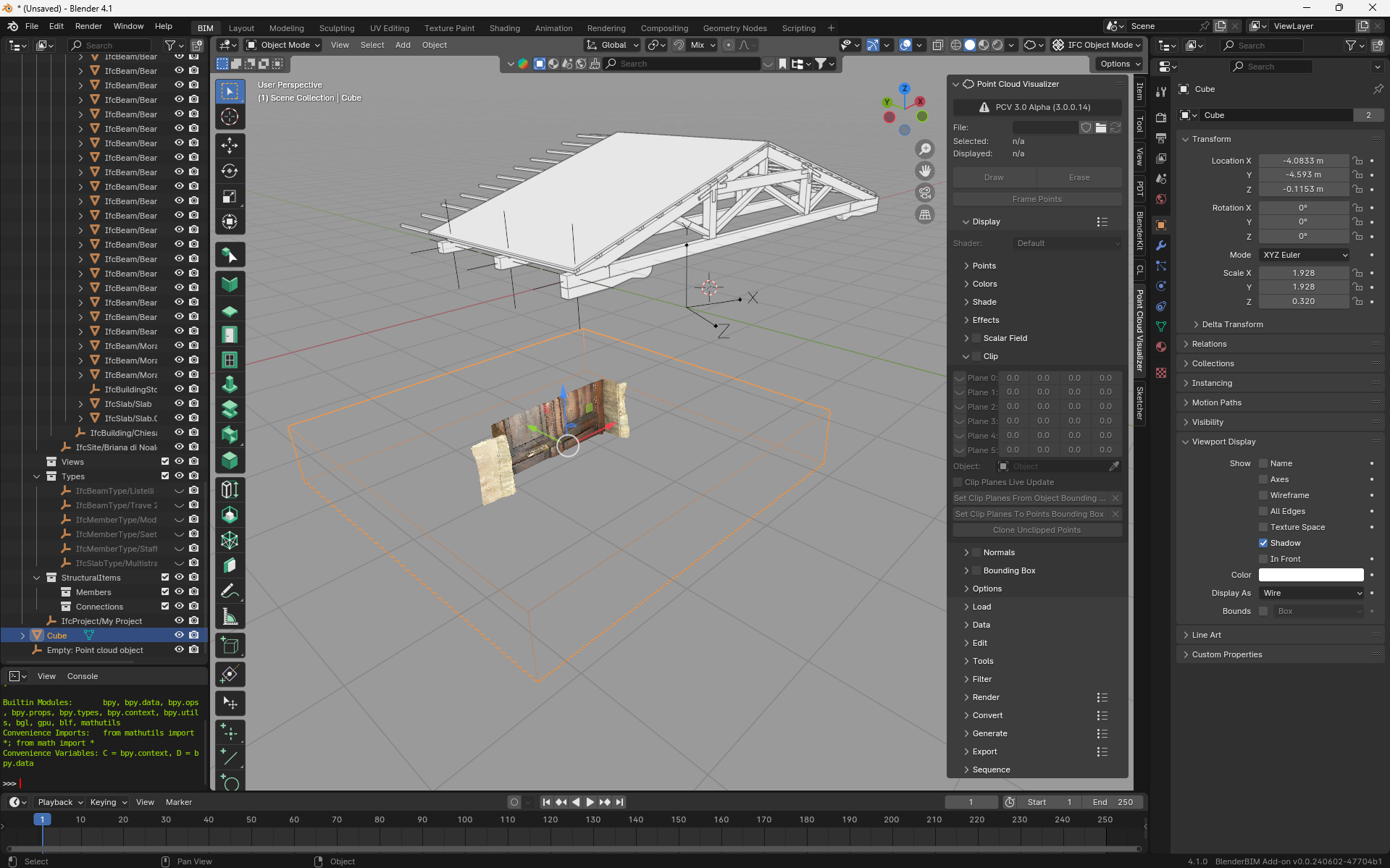
This creates a Pset on an IFC element that acts a proxy for the point cloud. It stores a number PCV settings and the clipping cube transform. There are two operators, one to store the settings when you quit Blender, and one to restore the settings when you imported the project in a blank blend file.
This should work as is, if you don't see the operators with F3 you need to enable developer extras in the preferences. You can add properties to store / restore by modifying the paths and property name in pcv_mapping_dict
import bpy
from mathutils import Matrix
import json
try:
from ifcopenshell.api import run
from blenderbim.bim.ifc import IfcStore
import blenderbim.tool as tool
except:
pass
finally:
pcv_mapping_dict = {
"File Path": ("point_cloud_visualizer.data", "filepath"),
"Shader": ("point_cloud_visualizer.shader", "type"),
"Percentage": ("point_cloud_visualizer.display", "percentage"),
"Point Size": ("point_cloud_visualizer.display", "point_size"),
"Alpha": ("point_cloud_visualizer.display", "global_alpha"),
"Clip": ("point_cloud_visualizer.shader", "clip_enabled"),
"Clip Planes Live Update": ("point_cloud_visualizer.shader", "clip_planes_from_bbox_object_live"),
"Use Scalars": ("point_cloud_visualizer.display", "use_scalar"),
"Scalar Use Scheme": ("point_cloud_visualizer.display", "use_scheme"),
"Scalar Scheme": ("point_cloud_visualizer.display", "scheme"),
"Scalar Opacity": ("point_cloud_visualizer.display", "bleeding"),
"Scalar Mode": ("point_cloud_visualizer.display", "blending_mode"),
}
class GU_OT_IFC_PCV_update_settings(bpy.types.Operator):
bl_idname = "ifc.pcv_update_settings"
bl_label = "Update PCV Settings"
bl_options = {"REGISTER", "UNDO"}
**@classmethod**
def poll(cls, context):
obj = context.active_object
if obj is None:
return
element = tool.Ifc.get_entity(obj)
if not element:
return
return bool(tool.Pset.get_element_pset(element, "PointCloudVisualizerProps"))
def execute(self, context):
obj = context.active_object
element = tool.Ifc.get_entity(obj)
pset = tool.Pset.get_element_pset(element, "PointCloudVisualizerProps")
for prop in pset.HasProperties:
value = prop.NominalValue.wrappedValue
if prop.Name == "Clip Object Name":
if not value:
continue
obj_clip = bpy.data.objects.get(value)
if not obj_clip:
bpy.ops.mesh.primitive_cube_add(
size=2, enter_editmode=False, align="WORLD", location=(0, 0, 0), scale=(1, 1, 1)
)
obj_clip = context.view_layer.objects.active
obj_clip.name = value
obj_clip.display_type = "BOUNDS"
obj_clip.select_set(False)
context.view_layer.objects.active = obj
obj.select_set(True)
obj.point_cloud_visualizer.shader.clip_planes_from_bbox_object = obj_clip
clip_obj_matrix_prop = next(
(p for p in pset.HasProperties if p.Name == "Clip Object Matrix"), None
)
if clip_obj_matrix_prop:
matrix_1d = json.loads(clip_obj_matrix_prop.NominalValue.wrappedValue)
matrix = [
(
matrix_1d[4 * i],
matrix_1d[4 * i + 1],
matrix_1d[4 * i + 2],
matrix_1d[4 * i + 3],
)
for i in range(4)
]
obj_clip.matrix_world = Matrix(matrix)
elif prop.Name == "Scalar Range Min":
obj.point_cloud_visualizer.display.range[0] = value
elif prop.Name == "Scalar Range Max":
obj.point_cloud_visualizer.display.range[1] = value
elif prop.Name in pcv_mapping_dict:
prop_path, attr = pcv_mapping_dict[prop.Name]
setattr(obj.path_resolve(prop_path), attr, value)
return {"FINISHED"}
class GU_OT_IFC_PCV_store_settings(bpy.types.Operator):
bl_idname = "ifc.pcv_store_settings"
bl_label = "Store PCV Settings"
bl_options = {"REGISTER", "UNDO"}
def execute(self, context):
obj = context.active_object
ifc = tool.Ifc.get()
element = tool.Ifc.get_entity(obj)
pset = run("pset.add_pset", ifc, product=element, name="PointCloudVisualizerProps")
properties = {k: getattr(obj.path_resolve(v[0]), v[1]) for k, v in pcv_mapping_dict.items()}
clip_object = obj.point_cloud_visualizer.shader.clip_planes_from_bbox_object
properties["Clip Object Name"] = clip_object.name if clip_object else None
if clip_object:
rows = clip_object.matrix_world.row
matrix_1d = []
for row in rows:
for elt in row:
matrix_1d.append(elt)
properties["Clip Object Matrix"] = json.dumps(matrix_1d)
properties["Scalar Range Min"] = obj.point_cloud_visualizer.display.range[0]
properties["Scalar Range Max"] = obj.point_cloud_visualizer.display.range[1]
run("pset.edit_pset", ifc, pset=pset, properties=properties)
ifc.write(IfcStore.path)
context.view_layer.objects.active = context.active_object
return {"FINISHED"}
bpy.utils.register_class(GU_OT_IFC_PCV_update_settings)
bpy.utils.register_class(GU_OT_IFC_PCV_store_settings)